Java性能优化01-程序优化
Java性能优化02-并行优化
Java性能优化03-JVM调优
Java性能优化04-调优工具
并行设计模式
Future模式
JDK内置了Future模式,最为重要的模块是FutrueTask类,它实现了Runnable接口,作为单独的线程运行。在其run()方法中,通过Sync内部类,调用Callback接口,并维护Callable接口的返回对象。当使用FutureTask.get()方法时,将返回Callback接口的返回对象。除了基本的功能外,JDK内置的Futrue模式还可以取消Futrue任务或设置超时时间
Master-Worker模式
是常用的并行模式之一,核心思想是系统由两类进程协作工作:Master进程和Worker进程。Master进程负责接收和分配任务,Worker进程负责处理子任务。当各个Worker进程将子任务处理完成后,将结果返回给Master进程。这种模式的好处是能够将一个大任务分解为若干个小任务,并行执行,从而提高系统的吞吐量。而对于请求者来说,任务提交后Master会分配任务并返回,并不需要等待全部完成后返回,其处理过程是异步的
Master-Worker模式是一种使用多线程进行数据处理的结构。多个Worker进程协作处理用户请求,Master进程负责维护Worker进程,并整合最终处理结果。一种简单的实现就是Master作为主进程,维护一个Worker进程队列、子任务队列和子结果集
Guarded Suspension模式
意为保护暂停,其核心思想是仅当服务进程准备好时,才提供服务。在服务端短时间收到大量请求时,超过了处理能力,这时候将请求进行排队,由服务端一个接一个处理,这样就保证请求不丢失,又能避免同时处理太多请求而崩溃。Guarded Suspension模式可以确保系统仅在有能力处理某个任务时,才会处理。没有能力处理任务时,它将暂存任务信息,等待系统空闲。普通的Guarded Suspension模式不能返回处理结果,结合Future模式,就可以进行扩展,构造一个可以携带返回值的Guarded Suspension
不变模式
具有强一致性和不变性,天然的多线程友好。基本上去除setter等修改方法,将所有属性设为私有并final,确保没有子类可以重载(final class),拥有一个可以创建完整对象的构造函数。就可以实现一个不变对象,它是不需要被同步的,在需求允许下,不变模式可以提高系统的并发性能和并发量
生产者-消费者模式
其核心组件是共享内存缓冲区,作为生产者和消费者间的通信桥梁,同时由于缓冲区的存在,使得生产和消费速度间存在时间差
线程池
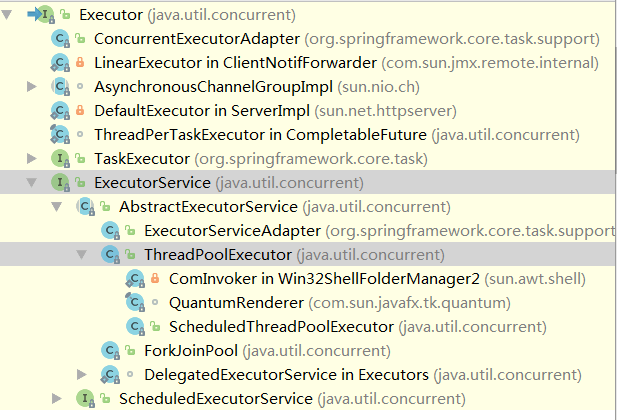
JDK提供了一套Executor框架,其中ThreadPoolEecutor表示一个线程池,Executors类则扮演线程池工厂的角色。ThreadPoolEecutor类实现了Executor接口,因此通过这个接口任何Runnable对象都可以被ThreadPoolEecutor调度
public ThreadPoolExecutor(int corePoolSize, // 核心线程数
int maximumPoolSize, // 最大线程数
long keepAliveTime, // 多余的空闲线程存活时间
TimeUnit unit, // 时间单位
BlockingQueue<Runnable> workQueue, // 任务队列
ThreadFactory threadFactory, // 线程工厂
RejectedExecutionHandler handler) // 拒绝策略
几种BlockingQueue:
1、直接提交队列:SynchronousQueue,没有容量,每一个插入操作都需要等待一个相应的删除操作,SynchronousQueue不保存任务,总是将任务提交给线程执行,如果没有空闲线程,则尝试新增新的线程,如果线程数量达到最大值则执行拒绝策略。例如Executors.newCachedThreadPool
2、有界队列:ArrayBlockingQueue。若有新任务需要执行,如果线程池实际线程数小于corePoolSize,则优先创建新线程,若大于corePoolSize则新任务加入等待队列。当队列已满时,若总线程数不大于maximumPoolSize,则创建新的线程执行任务,若大于则执行拒绝策略
3、无界任务队列:LinkedBlockingQueue。与有界队列相比,除非系统资源耗尽,否则无界队列不存在任务入队失败的情况,并且系统线程数到达corePoolSize后就不会继续增加,后续新任务进来又没空闲线程情况下,直接进入队列等待,无界队列将一直增长直到系统内存耗尽。例如Executors.newSingleThreadExecutor和Executors.newFixedThreadPool
PS、LinkedBlockingQueue中的锁是分离的,生产者的锁PutLock,消费者的锁takeLock,而ArrayBlockingQueue生产者和消费者使用的是同一把锁;LinkedBlockingQueue内部维护的是一个链表结构,而ArrayBlockingQueue内部维护了一个数组;ArrayBlockingQueue在初始化的时候,必须传入一个容量大小的值
4、优先任务队列:带有执行优先级的队列,通过PriorityBlockQueue实现。可以控制任务的执行先后顺序,是一个特殊的无界队列。ArrayBlockingQueue与LinkedBlockingQueue都是按照先进先出算法处理任务的,而PriorityBlockQueue则可以根据任务自身的优先级顺序先后执行(实现Comparable接口)
估算线程池大小:Nthreads = Ncpu
ThreadPoolExecutor也是一个可以扩展的线程池,它提供了beforeExecute()、afterExecute()和terminated()3个接口对线程池进行控制
并发数据结构
并发List
Vector或CopyOnWriteArrayList是两个线程安全的List实现,ArrayList不是,如果要使用则需要Collections.synchronizedList(List
并发Set
与List相似,并发Set也有一个CopyOnWriteArraySet,它的内部实现完全依赖于CopyOnWriteArrayList,因此特性与CopyOnWriteArrayList一致,适用于读多写少的场景。在需要并发写的场景下则可以使用Collections.synchronizedSet(Set
并发Map
也同样可以使用Collections.synchronizedMap(Map<K,V> m)方法,但是高并发下这个Map的性能不是最优的。由于Map是使用频繁的一个数据结构,因此JDK提供了专用于高并发的ConcurrentHashMap,它的get也是无锁的,put操作的锁粒度又小于同步的HashMap
并发Queue
并发队列上,JDK提供了两套实现,一个是以ConcurrentLinkedQueue为代表的高性能队列,一个是以BlockingQueue接口为代表的阻塞队列。ConcurrentLinkedQueue通过无锁的方式实现了高并发状态下的高性能,通常性能要好过BlockingQueue。而BlockingQueue的典型使用场景就是生产者-消费者模式中或多线程间的数据共享,提供了一种读写阻塞等待的机制。BlockingQueue主要的两种实现是ArrayBlockingQueue和LinkedBlockingQueue
并发Deque
双端队列Double-ended Queue,允许在队列头部或尾部进行出队和入队操作。有3个实现类,LinkedList使用链表实现了双端队列,ArrayDeque使用数组实现双端队列,拥有高效的随机访问性能,在数据量不大的情况下表现更好,但是它们都不是安全的。LinkedBlockingDeque是一个线程安全的双端队列实现,内部使用了链表结构,由于没有进行读写锁的分离,因此同一时间只能有一个线程对其进行操作,因此实际应用场景中性能很低
并发控制方法
Java内存模型与volatile
在Java中,每个线程都有一块工作内存区,其中存放被所有线程共享的主内存中变量的拷贝。线程只能操作自己的工作内存,不能直接操作主内存的数据,每次使用共享变量需要从主内存中进行拷贝到工作内存,完成后将变量值从工作内存写回主内存。一个线程可以执行使用(use)、赋值(assign)、装载(load)、存储(store)、锁定(lock)、解锁(unlock)。而主内存可以执行读()、写()、锁定(lock)、解锁(unlock),每一个操作都是原子的。特殊的,double和long类型变量是非原子操作,如果一个double或long变量没有声明volatile,则变量在进行read或write操作时,主内存会把它当做两个32位的read或write操作,则两个操作间是可以分开的,因此32位系统中,必须对double或long进行同步
虽然线程或主内存的操作是原子的,但是主内存和线程的工作内存间的数据传送并不满足原子性。即当数据从主内存复制到工作内存时,必定出现2个动作:主内存执行的read操作,工作内存执行的相应的load操作。当数据从工作内存拷贝到主内存时,同样也有2个动作:工作内存执行的store操作,主内存执行的相应的write操作
由于每个线程都有自己的工作内存区,因此一个线程改变自己工作内存中的数据,对其他线程是不可见的。为此,可以使用volatile关键字迫使所有线程均读写主内存中的对应变量(强制同步),使得volatile变量在多线程间可见。声明volatile的变量保证:1、其他线程对变量的修改,可以即时反应在当前线程中。2、确保当前线程对volatile变量的修改,能即时写回共享主内存中,并被其他线程所见。3、使用volatile声明的变量,编译器会保证其有序性(内存屏障)
synchronized关键字
最常用的同步方法,并且在JVM不断优化下,与非公平锁的差距缩小,同时synchronized更加简洁明了,可读性和可维护性更好
synchronized可以锁定一个对象的方法,也可以构造同步代码块。此外synchronized还可以用于static函数,相当于将锁加到当前的class对象上,所有对该方法的调用都必须得到class对象的锁
虽然synchronized可以保证对象或代码的线程安全,但是为了实现多线程间的交互,还需要使用Object对象的wait()和notify()方法
ReentrantLock可重入锁
ReentrantLock比内部锁synchronized拥有更强大的功能,可以中断,可以定时。ReentrantLock提供了公平锁和非公平锁两种锁,公平锁的实现代价更大,所以无特殊需要优先选择非公平锁,而synchronized提供锁也不是绝对公平的。在ReentrantLock使用完毕后,需要手动释放锁
ReadWriteLock读写锁
ReadWriteLock是读写分离锁,可以有效帮助减少锁竞争,提升系统性能。读写锁允许多个线程同时读,但是考虑到数据完整性,写写操作和读写操作间依然是需要互相等待和持有锁的。如果系统中,读操作次数远大于写操作次数,读写锁就可以发挥最大的功效
Condition对象
线程间的协调工作光有锁是不够的,业务层可能会有更复杂的协作逻辑,Condition对象就可以用于协调多线程间的复杂操作。Condition是与锁相关联的,通过Lock接口的Condition newCondition()方法可以生成一个与锁绑定的Condition实例
Condition接口提供的基本方法有:
1、await()方法会使当前线程等待,同时释放当前锁,当其他线程中使用signal()或signalAll()方法时,线程会重新获得锁并继续执行。或者当线程被中断时,也能跳出等待
2、awaitUninterruptibly()方法与await()方法基本相同,但是它并不会在等待过程中响应中断
3、singal()方法用于唤醒一个等待中的线程
4、singalAll()方法唤醒所有在等待中的线程
BlockingQueue在实现队列满时让生产者等待,又在队列空时让消费者等待中,就与Condition紧密相关
Semaphore信号量
信号量为多线程协作提供了更为强大的控制方法。广义上信号量是对锁的扩展。无论是内部锁synchronized还是重入锁ReentrantLock,一次都只允许一个线程访问一个资源,而信号量却可以指定多个线程同时访问某一个资源。在构造信号量对象时,必须要指定信号量的准入数,即同时能申请多少个许可。当每个线程每次只申请一个许可时,将相当于指定了同时有多少个线程可以访问某一个资源
信号量使用acquire()方法尝试获得一个准入的许可,若无法获得,则线程会等待直到有线程释放一个许可或当前线程被中断。acquireUninterruptibly()方法和acquire()方法一样只是不响应中断。tryAcquire()尝试获得一个许可,成功返回true失败返回false,它立即返回不会等待。release()用于在线程访问资源结束后,释放一个许可,以使得其他等待许可的线程可以进行资源访问
ThreadLocal线程局部变量
ThreadLocal是一种多线程间并发访问变量的解决方案,与synchronized等加锁方式不同,ThreadLocal完全不提供锁,而是以空间换时间的方式,为每个线程提供变量的独立副本,以保障线程安全,因此它不是一种数据共享的解决方案
锁的性能和优化
死锁
死锁问题是多线程特有的问题,是线程间切换消耗系统性能的一种极端情况。在死锁时线程间相互等待,而又不释放自己的资源,导致无穷无尽的等待,让系统任务永远无法完成。需要坚决避免和杜绝,可以通过线程dump查看死锁情况
一般情况出现死锁满足以下条件:
1、互斥条件
2、请求与保持条件
3、不剥夺条件
4、循环等待条件
减小锁持有时间
在锁竞争中,单个线程对锁的持有时间和系统性能有着直接关系,因此尽可能减少对某个锁的占有时间,可以减少线程间互斥的可能。一个较为优化的方案就是,只有在必要时进行同步
减少颗粒度
减小锁的粒度也是一种削弱多线程间锁竞争的有效手段,比如对资源进行分段拆分,这样就不用对整个资源获取全局锁。减小颗粒度,就是缩小锁定对象的范围,从而减少锁冲突的可能性,进而提高系统性能
读写分离锁代替独占锁
在读多写少的场景下,读写锁ReadWriteLock可以提高系统的性能,这是减少颗粒度的一种特殊情况。在对象没有锁的情况下,才能获得对象写锁;在写锁释放前,也无法在对象上附加任何锁(读/写锁)
锁分离
读写锁思想的延伸就是锁分离。使用类似分离的思想,也可以对独占锁进行分离,一个典型的例子就是LinkedBlockingQueue的实现
在LinkedBlockingQueue的实现中,take()和put()方法分别实现了从队列中取得数据和往队列中增加数据的功能。虽然两个方法都对队列进行了修改操作,但由于LinkedBlockingQueue是基于链表的,因此两个操作分别作用于队列的头和尾,理论上两者并不冲突。因此在JDK的实现上,用了两把锁分离了take()和put()操作
自旋锁
自旋锁可以使线程在没有取得锁后,不被挂起,转而去执行一个空循环(即自旋),在若干的空循环后,若线程获得了锁则继续进行,若线程依然不能获得锁,才会被挂起。使用自旋锁后,线程被挂起的概率就会相对减少,线程执行的连贯性相对加强。因此对那些锁竞争不是很激烈,锁占用时间很短的并发线程,有着积极的作用
JVM虚拟机也提供-XX+UseSpinning参数来开启自旋锁,使用-XX:PreBlockSpin参数设置自旋次数
其他优化
锁粗化:在虚拟机遇到一连串的对同一锁不断进行请求和释放的操作时,便会把所有的锁操作整合成对锁的一次请求,从而减少对锁的请求同步次数。锁粗化的思想与减少锁持有时间是相反的,但在不同场合权衡下,它们的效果并不相同
锁消除:是JVM在即时编译时,通过对运行上下文扫描,去除不可能存在共享资源竞争的锁。通过锁清除,可以节省毫无意义的请求锁时间。比如使用了Vector,StringBuffer等内置工具类,里面的同步方法有时是不需要的,JVM虚拟机可以在运行时,基于逃逸分析技术,捕获到这些不可能存在竞争缺申请锁竞争的代码段,并消除这些不必要的锁,从而提高系统性能。逃逸分析和锁清除分别可以使用JVM参数-XX:+DoEscapeAnalysis和-XX:+EliminateLocks开启(锁消除必须工作在-server模式下)
锁偏向:如果程序没有竞争,则取消之前已经取得锁的线程同步操作。也就是说若某一锁被线程获取后,便进入偏向模式,当线程再次请求这个锁时,无需进行相关的同步操作,节省操作时间。如果在此期间有其他线程进行了锁操作,则锁退出偏向模式。在JVM中可以使用-XX:+UseBiasedLocking开启。但是偏向锁在竞争激烈的场景下没有优化效果,此时不仅得不到性能优化,还会有损系统性能
无锁的并行计算
在高并发时,对锁的激烈竞争可能会成为系统瓶颈。为此可以采取一种称为非阻塞同步的方法,依然保证数据和程序在高并发环境下保持多线程间的一致性
非阻塞的同步/无锁
基于锁的同步方式,也是一种阻塞式的线程间同步方式,无论使用信号量、重入锁或内部锁,受到核心资源限制,不同线程竞争时,都会不可避免相互等待,从而阻塞当前线程
最简单的一种非阻塞式同步就是ThreadLocal,每个线程拥有各自独立的副本,并行计算时无需互相等待
CAS算法是一种基于比较并交换的无锁并发控制方法。与锁的实现相比,无锁算法的设计和实现都会复杂很多,但由于其非阻塞性,对死锁问题天然免疫,而且线程间相互影响也远远小于基于锁的方式。更为重要的是无锁方式没有锁竞争带来的系统开销,也没线程间频繁调度切换带来的开销,因此拥有更好的性能
CAS包含3个参数(V,E,N),V表示要更新的变量,E表示预期值,N表示新值。仅当V值等于E值时,才会将V的值设为N,如果V值和E值不相等,则说明已经有其他线程做了更新,则当前线程什么都不做。最后CAS返回当前V的真实值。当多个线程同时使用CAS操作同一个变量时,只有一个会胜出,其余均会失败,失败的线程不会被挂起,仅被告知,并且允许再次尝试,也允许失败线程放弃操作
硬件层面大部分现代处理器都已支持原子化的CAS指令
原子操作
在JDK的java.util.concurrent.atomic包下,有一组使用无锁算法实现的原子操作类,主要由AtomicInteger、AtomicInegerArray、AtomicLong、AtomicLongArray和AtomicReference等。它们分别封装对整数、整数数组、长整数、长整数数组和普通对象的线程安全操作
它们就是使用了CAS算法进行工作的,会使用一个无穷循环进行CAS冲突处理,即当前线程受其他线程影响失败时,会不断尝试直到成功
Amino框架
Amino框架是无锁并行框架,是Apache的一个分支项目,提供了可用于线程安全的、基于无锁算法的一些数据结构,同时还内置了一些多线程调度模式
Amino提供了一些基础集合类,比如List、Set等集合类,均采用无锁的方式实现,封装了复杂的无锁算法。比如LockFreeList(链表)、LockFreeVector(数组)、LockFreeSet
除了简单的无锁集合类,Amino还提供了无锁的树结构,LockFreeBSTree是一颗无锁且线程安全的二叉搜索树。Amino还提供了更为复杂的数据结构——图。主要提供了有向图和无向图两种数据结构
Amino还提供了一些非常有用的并行开发模式实现,比如Master-Worker模式,提供了两套实现,一种是静态的,另一种是动态的实现
协程
与进程相比,线程是一个较为轻量级的并行程序解决方案。但是对于高并发程序而言,线程对系统资源的占用量依旧不小,则也限制了系统的并发数。为了进一步提升系统并发数,可以对线程做进一步分割,即所谓的协程。无论是进程、线程还是协程,在逻辑层它们都对应一个任务,以执行一段代码逻辑。当使用协程实现一个任务时,协程并不完全占据一个线程,当一个协程处于等待状态时,它便会把CPU交给该线程内的其他协程。与线程相比,协程间的切换更为轻便,因此具有更低的操作系统成本和更高的任务并发性
Kilim框架
协程并不被Java语言原生支持,因此在Java中使用协程,可以使用协程框架,比如Kilim框架
引用:《Java程序性能优化》